
신호 및 시스템 Chapt 1
Updated:
Alan V. Oppenheim, Signals and Systems 책 내용입니다.
1. 신호와 시스템
1.1 연속시간 신호와 이산시간 신호
1.1.1 예와 수학적 표현
- 신호 : 정보를 담고 있음. 정보는 하나의 패턴으로 나타남
- 신호는 한 개 이상의 독립적인 변수들의 함수들로 표현됨
연속시간 신호(Continuous-Time Signal) : 독립변수가 연속적
- 독립변수 t 사용
- 괄호 ( $\cdot$ )
이산시간 신호(Discrete-Time Signal) : 독립변수가 이산적
- 독립변수 n 사용
- 괄호 [ $\cdot$ ] 사용
- 오직 정수값에 대해서만 정의되어 있음 $\rightarrow$ $x[n]$을 이산순차열(discrete-time sequence) 또는 순차열(sequence) 이라고 불림
- 통계적인 데이터 신호들은 모두 이산시간 신호임
1.1.2 신호 에너지와 파워
신호 에너지
- 연속시간 :
- 이산시간 :
평균 파워
- 연속시간 :
-
이산시간 :
-
위의 정의들을 통해 신호는 3가지로 구분 가능
(1) 유한 총 에너지를 가지는 신호들 $E_\infty < \infty \rightarrow P{\infty}=0$
$\quad$ $P_{\infty}=\lim_{T\to\infty} \frac{E_\infty}{2T}=0$ 이기 때문
(2) 유한한 평균 파워를 가지는 신호들 $P_{\infty}>0 \rightarrow E_\infty = \infty$
(3) 무한한 평균 파워, 에너지 $P_{\infty}=\infty , E_\infty = \infty$
1.2 독립변수의 변환
- 신호와 시스템의 주된 개념은 변환임
1.2.1 독립변수의 변환 예
시간이동(time shift)
- $t_0, n_0$ 만큼 신호가 지연, 앞섬
시간반전(time reversal)
- $t \rightarrow -t$ 또는 $n \rightarrow -n$
시간 스케일링 (time scaling)
- $x(\alpha t )$ 또는 $x[\beta n]$
- 신호를 축소 또는 확장 하는 것
일반적인 변환
- $x(\alpha t + \beta)$ 또는 $x[\alpha n +\beta]$
1.2.2 주기 신호(Periodic Signal)
- $x(t)=x(t+T)$ : 주기 T를 갖는 주기 신호(연속신호에서 정의)
- 기본 주기 $T_0$ : 위의 식을 만족하는 가장 작은 양의 $T$값
- $x[n]=x[n+N]$ : 주기 N를 갖는 주기 신호(이산신호에서 정의)
- 기본 주기 $N_0$ : 위의 식을 만족하는 가장 작은 양의 $N$값
1.2.3 우함수 신호와 기함수 신호
- 우함수 신호 $x(-t)=x(t)$, $x[-n]=x[n]$
- 기함수 신호 $x(-t)=-x(t)$, $x[-n]=-x[n]$
- 기함수 신호는 t=0에서 0임
- 모든 신호는 기함수, 우함수 신호들로 분리됨
1.3 지수신호와 정현파신호
1.3.1 연속시간 복소지수신호와 정현파신호
복소지수신호
- C와 a는 복소수임
Case 1. 실지수신호 : C와 a가 실수
- 아래의 두가지 형태로 존재

Case 2. 주기적인 복소지수신호와 정현파 신호 : a가 순수 허수
- 이 신호는 주기적임
- 주기적이기 때문에
- 최소 기본주기는 다음 값과 같음 $\rightarrow$ 기본주파수는 기본주기에 반비례
- 오일러 관계(Euler’s relation) 에 따르면 위 신호들은 정현파 신호로 변환 가능
- 해당 신호는 무한한 에너지, 유한한 평균 파워를 가지는 신호의 중요한 예
- 복소지수 $e^{jwt}$가 주기 $T_0$를 갖기 위해서는
- 즉 $w$는 $w_0$의 정수배

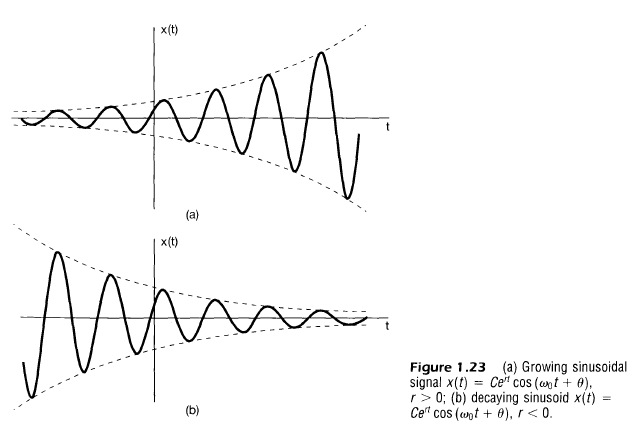
Case 3. 일반적인 복소지수신호
-
즉 함수는 다음과 같이 표현 가능
-
아래 그래프의 포락선은 복소지수의 크기와 동일 즉 $\pm C e^{rt}$ - r>0일 시 증가하는 정현파, r<0일 시 감소하는 정현파
1.3.2 이산시간 복소지수 및 정현파 신호
- 복소지수신호 or 순차열
- 또한 다음과 같은 형식으로 표현 가능
- 둘 다 같은 의미($\alpha=e^\beta$) 위의 식으로 표현하는 것이 더 편리
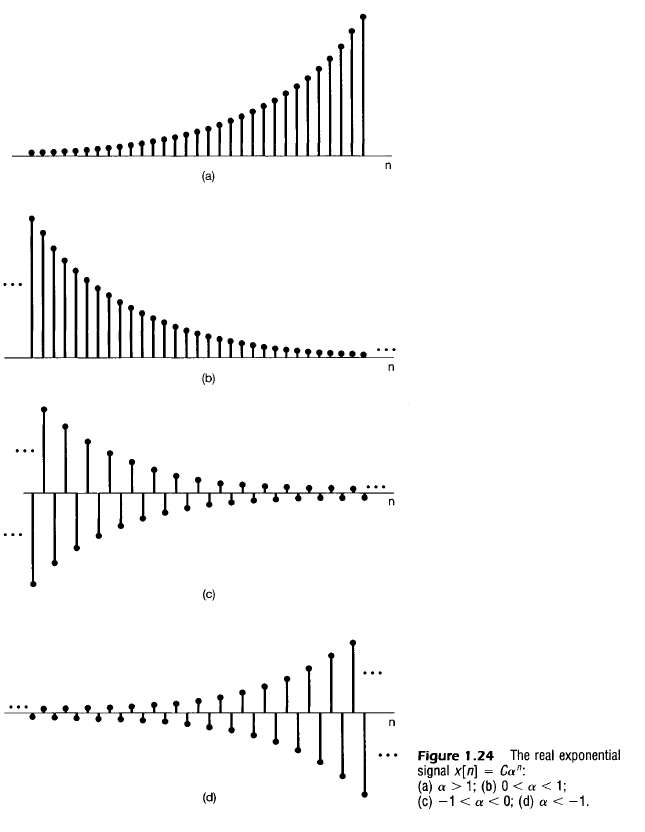
Case 1. 실지수신호 : C와 a가 실수
- 아래의 4가지 형태로 존재
- $\alpha$의 값이 음수이면 x[n]의 부호는 번갈아 바뀜(c,d)
- 나머지는 연속상황과 비슷함
Case 2. 정현파 신호 : $\beta$가 순수 허수 $\leftrightarrow |\alpha|=1$
- 이 신호는 주기적임
- 오일러 관계(Euler’s relation) 에 따르면 위 신호들은 정현파 신호로 변환 가능
- 해당 신호는 무한한 에너지, 유한한 평균 파워를 가지는 이산신호의 중요한 예
Case 3. 일반적인 복소지수신호
-
즉 함수는 다음과 같이 표현 가능
-
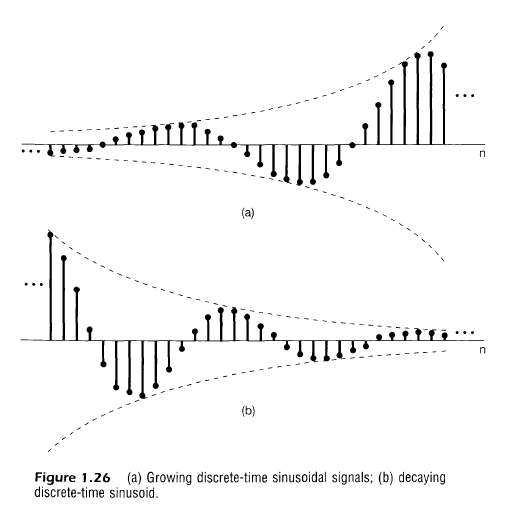
a =1일때 복소 지수열의 실수와 허수 부분은 정현파 -
a <1일때 지수적으로 감쇠하는 걸로 곱해짐 - |a|>1일때는 지수적으로 증가하는 것으로 곱해짐
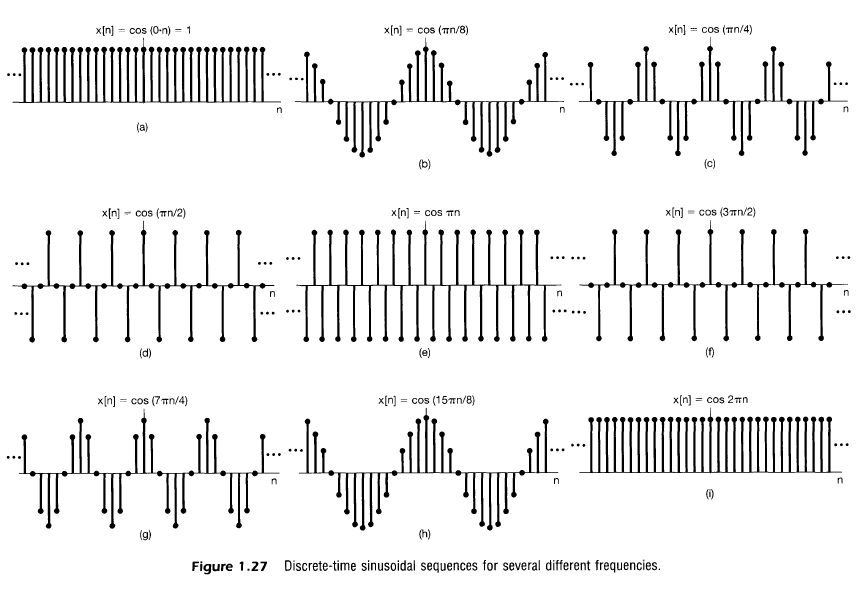
1.3.3 이산시간 복소지수의 주기 특성
- 연속신호 $e^{jw_0t}$의 특징
$\quad$ (1) $w_0$의 크기가 커질수록 신호에서 진동의 비율은 높아진다
$\quad$ (2) 어떤 $w_0$값에 대해서도 주기적
- 이산신호에는 성립하지 않음
$\quad$ ex) 이산신호에는 $e^{j(w_0+2\pi)n}=e^{jw_0 n}e^{2\pi n}=e^{jw_0 n}$
$\quad$ $w_0+2\pi$인 지수는 주파수가 $w_0$과 같음 $\rightarrow$ 연속시간의 경우와 매우 다른 상황 발생
즉 이산시간 복소지수를 고려할 때는 $2\pi$ 길이의 주파수 구간만 고려하면 됨
-
위의 특성 때문에 아래 그림에서 $w_0$을 0에서 $\pi$까지 증가시키면 신호는 더 급속하게 진동하지만, $\pi$에서 $2\pi$까지 이르면 진동률은 감소한다
- 이산 복소지수의 주기가 N이 되기 위해서 아래의 식이 성립해야 함
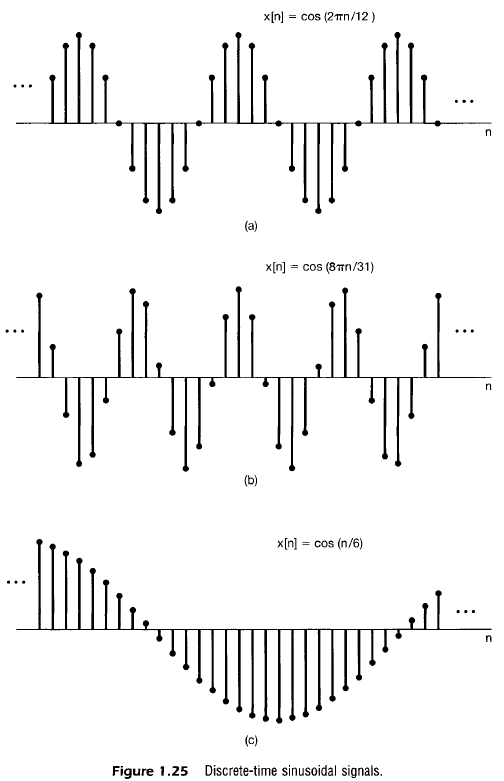
즉 이산시간 복소지수를 고려할 때 $w_0/2\pi$가 유리수가 나와야지 주기적, 그렇지 않으면 주기적이지 않음(ex. 1.25(c))
- 위의 식을 통해 (주기를 아는 경우) 신호의 기본주파수는 다음과 같이 구할 수 있음
내용 정리하면 아래의 표와 같음
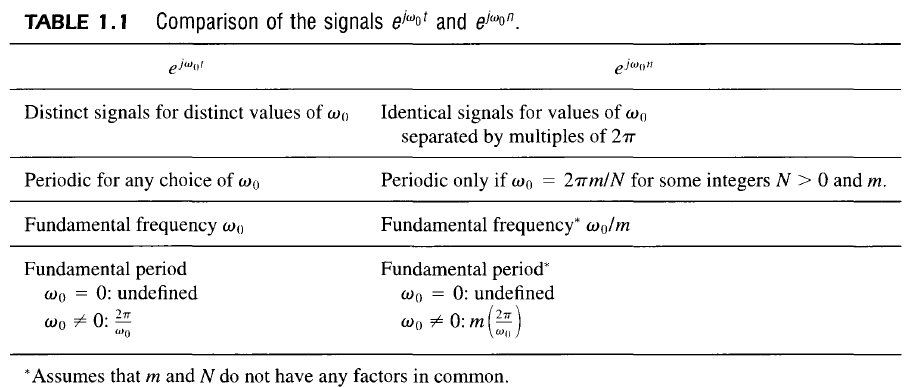
ex) $cos[8\pi n/31]$의 주기 $T=31$, $w_0=8/31$, 기본주파수=1/31
- 주기함수이므로
- 위와 같이 주어진 집합에서 구별되는 주기 지수들은 단지 N개뿐(0,1, … , N-1)
1.4 단위 임펄스 및 단위 계단 함수
1.4.1 이산시간 단위 임펄스 및 단위 계단 순차열(sequence)
단위 임펄스 (Unit Impulse)

단위 계단 (Unit Step)

-
둘 사이의 관계
-
다음과 같이 변형 가능
-
중요한 샘플링 특성을 가짐
1.4.2 연속시간 단위 임펄스 및 계단 함수
단위 계단 (Unit Step)

단위 임펄스 (Unit Impulse)
-
둘 사이의 관계
- But 불연속이므로 두 번째 성질을 적용하는데 문제가 발생
- 새롭게 정의(근사함수)
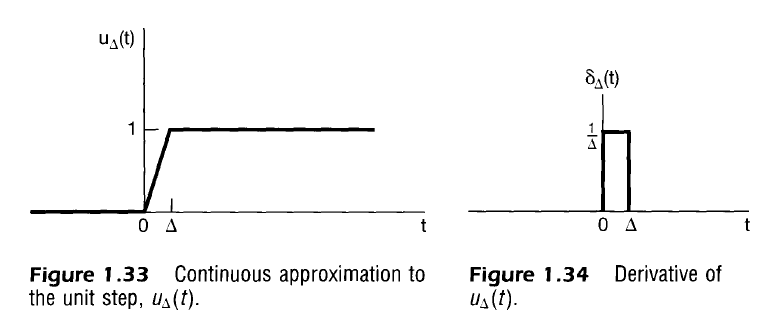
단위 임펄스 (Unit Impulse)
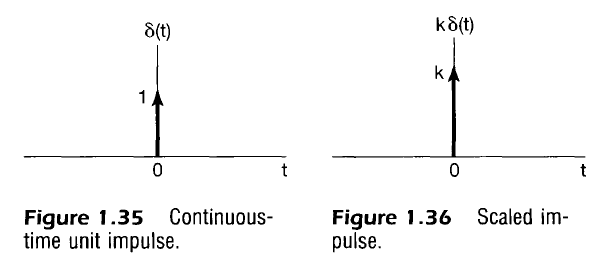
- 크기 “1”은 임펄스의 면적을 나타내기 위해 사용됨
- 비율 변화된 임펄스는 면적이 k이며 다음과 같이 정의
함수간의 관계를 다음과 같이 표시 가능(중요, 샘플링과 연결)

-
연속시간 임펄스도 중요한 샘플링 특성 존재
- 단위 임펄스는 이상화해서 정의한 것
- 실제 물리적 시스템은 관성이 있어서 입력에 대한 즉각적인 반응이 불가
- 즉 이렇게 짧은 펄스의 시스템 응답은 눈에 띌만한 영향을 주지 못함
- 그러나 펄스의 중요한 특징은 그 적분된 영역임
- 더이상 펄스의 형태나 구간이 문제가 되지 않기 전에 보다 짧은 펄스를 찾을 수 있음
- 단위 임펄스 : 어떠한 시스템에 대해 충분히 짧은 펄스
- 2.5장의 singulary function 쪽을 보면서 다시 복습해볼것
- 예제 1.7의 신호 복구를 보면 보다 잘 이해 가능
1.5 연속시간 및 이산시간 시스템
- 입력 신호가 시스템에 의해 변환되거나, 시스템에 의해서 응답되도록 해서 출력을 내게 하는 것을 의미
연속시간 시스템
- 연속적인 입력 신호가 가해져 연속적인 출력 신호가 나오는 시스템
이산시간 시스템
-
이산적인 입력 신호가 가해져 이산시간 출력 신호가 나오는 시스템
- 일반적으로 서로의 관계가 미분방정식 형태로 나타내짐
- 시스템에 대한 수학적인 표현을 위해서는 시스템을 두가지 특성을 가지고 있다고 인지해야 함 (1) 시스템은 우리가 분석을 하기 위해서 추출할 수 있는 구조와 성질을 가지고 있음 (2) 많은 실질적인 중요성을 갖는 시스템은 이러한 방식으로 정확히 모델링 될 수 있음
1.5.2 시스템의 상호연결(Interconnection)
- 직렬(Cascade) 상호연결
- 병렬(parallel) 상호연결
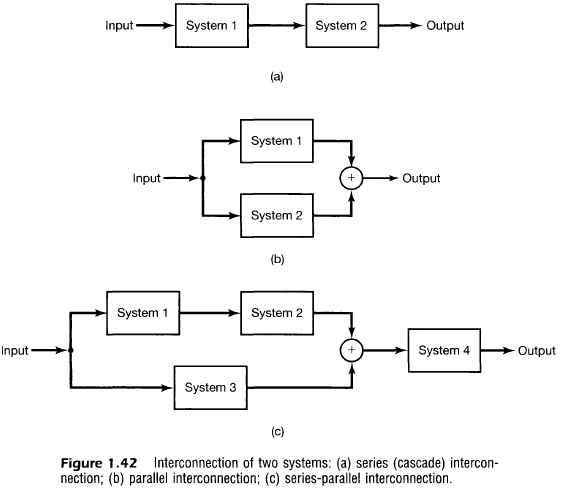
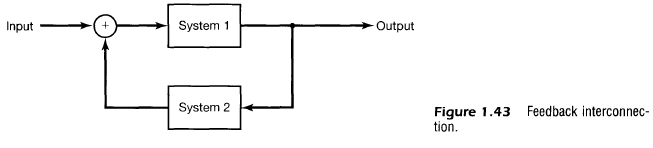
- 피드백(Feedback) 상호연결
1.6 기본적인 시스템 특성
1.6.1 메모리 시스템과 없는 시스템(Memoryless system)
메모리없는 시스템(Memoryless)
- 출력이 같은시간에 입력에만 의존할 때
- ex) 항등(identity system) $y(t)=x(t), y[n]=x[n]$
메모리 시스템 (memory system)
- 지난 시간 또는 이후 시간 데이터에도 의존
- ex) 누산기, 합산기, 지연기 $y[n]=x[n-1]$
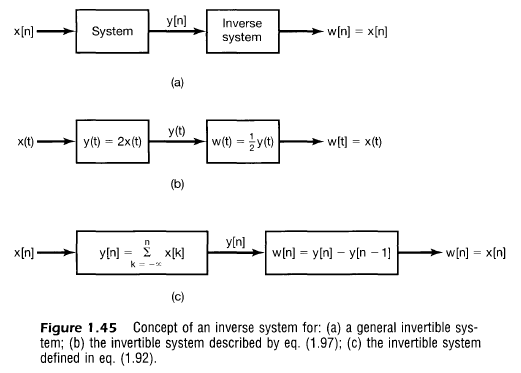
1.6.2 가역성(Invertibility)와 역시스템(Inverse system)
가역적(invertible)
- 별개의 입력에 대해 별개의 출력이 나옴
- 가역적이면 역시스템이 존재함
- 비가역적인 시스템의 예 $y[n]=0$
- 통신에서 중요함. 원래의 메세지를 코드화 하는 과정에서(인코딩) 신호에 중복성을 주어 전송 과정에서 발생할 수 있는 에러를 검출하고 가능하면 정정
- 손실이 없는 코딩(lossless coding)을 위해서는 출력에서 입력을 정확하게 재생할 수 있어야 됨
1.6.3 인과성(Causality)
- 시스템의 출력이 현재와 과거값에만 의존
- 비인과적인 시스템은 구간 좌우로 평균을 출력으로 하는 시스템(Moving Average)
1.6.4 안정성(Stability)
- 작은 입력에 대해서 출력이 발산하도록 하지 않는 성질
- 그림에서 위가 안정한 진자, 아래가 불안정한 역진자
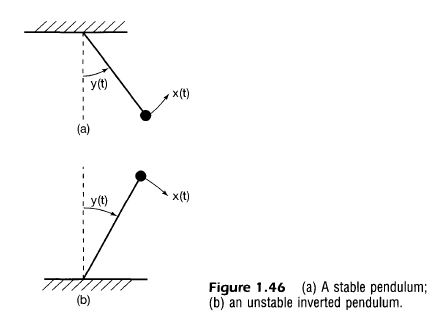
정리하자면 입력의 크기가 제한이 된다면 출력도 제한되어야 함(발산하지 않음)
1.6.5 시불변성(Time Invariance)
- 시스템의 행동과 특성이 시간에 고정되어 있는 시스템
-
즉 시간을 변경했을 때 시스템 응답이 동일하게 변환되는지 확인하면 됨
- 시불변 시스템이 아닌 중요한 예가 시간 스케일(Time-scaling) 시스템
1.6.6 선형성(Linearity)
- 중첩 특성을 만족하는 시스템(선형대수학)
(1) 가산성(additivity) : $x_1(t)+x_2(t)$에 대한 응답은 $y_1(t)+y_2(t)$
(2) 동질성(homogeity) : $ax_1(t)$에 대한 응답은 $ay_1(t)$, 여기서 a는 임의의 복소 상수
연속시간 : $ax_1(t)+bx_2(t) \rightarrow ay_1(t)+by_2(t)$
이산시간 : $ax_1[n]+bx_2[n] \rightarrow ay_1[n]+by_2[n]$
- 모든 시간에서 0인 입력은 모든 시간에서 0인 출력을 야기함(동질성)
1.7 정리
- 이후 이 책에서 중요한 관심은 연속시간, 이산시간 모두 선형 시불변 시스템(LTI system)에 집중될 것
Leave a comment